Bürstenloser Motor Aufbau und Kommutierung
Bürstenlose Motoren gibt es in unterschiedlichen Bauweisen. Bürstenlose Außenläufer werden gerne wegen des hohen Drehmoments verwendet. Dieses ist im Vergleich höher als bei einem bürstenlosen Innenläufer mit gleicher Baugröße. Real vermessene Magnetfelder eines bürstenlosen Motors eignen sich ideal um diesen zu optimieren.

Block-Kommutierung
Damit ein typischer bürstenloser Gleichstrommotor („Brushless direct current motor“ kurz BLDC) funktioniert, müssen die drei Motorphasen zum richtigen Zeitpunkt angesteuert werden. Wann und wie die Motorphasen angesteuert werden, wird als Kommutierung bezeichnet. Nachfolgen wird die Blockkommutierung gezeigt. Diese ist im Modellbaubereich weit verbreitet.Es werden die sechs Kommutierungsschritte gezeigt, welche sich fortlaufend wiederholen. Betrachten Sie das Bild in Ruhe, es benötigt etwas Zeit, bis Sie sich in den Ablauf hineindenken können.
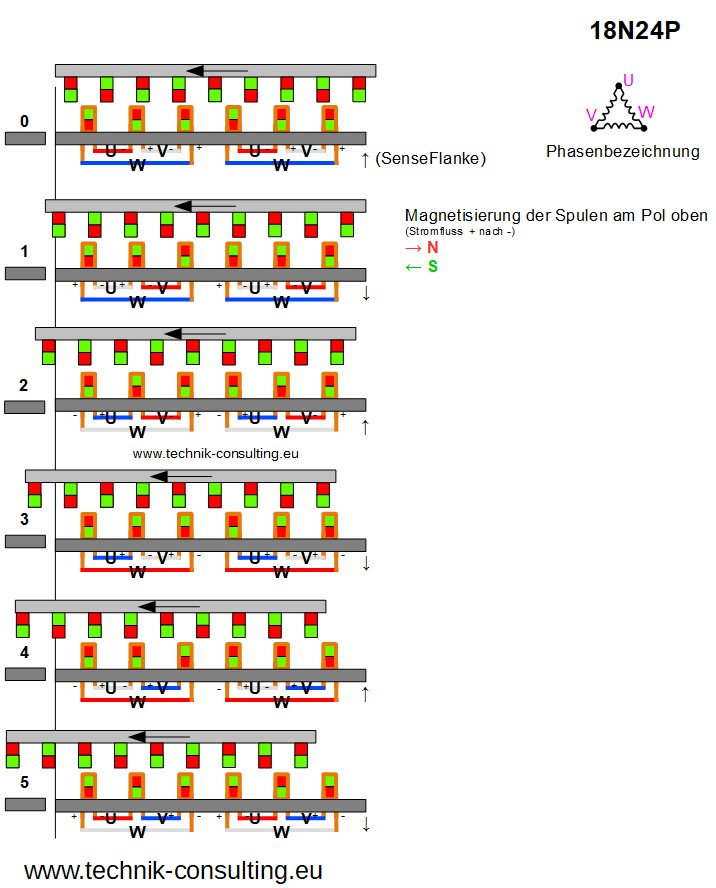
Die dunkelgraue Seite ist die Spulenseite. Bei einem Außenläufer ist dies im Motor der Stator. Hellgrau ist die Seite mit den Magneten dargestellt. Bei einem Außenläufer ist dies die Glocke mit den Magneten.
Polzahl, Nutenzahl, Durchmesser, Länge
Was es mit den Angaben des Motorherstellers z.B. „2212 12N14P“ auf sich hat wird hier einfach erklärt.Video über den Aufbau eines bürstenlosen Motors
Die ersten Zahlen beziehen sich immer auf den Durchmesser und die Länge des Motors bzw. Stators. Der Stator ist der nicht bewegliche Teil mit den Spulen.

Bürstenloser Motor (Außenläufer) mit entfernter Glocke. Der Stator mit den Spulen ist sichtbar.
Die 22 bedeutet bei dem Beispielmotor einen Statordurchmesser von 22 mm. Die 12 entspricht einer Statorlänge von 12 mm. Manche Hersteller geben allerdings die Außenabmessungen des kompletten Motors und nicht die Statorabmessungen an.
Eine weitere wichtige Größe eines bürstenlosen Motors ist die Konfiguration der Magneten und Nuten. Die Nuten sind die Bereiche zwischen den Ankern des Stators. An dieser Stelle berühren sich meistens die benachbarten Spulen.
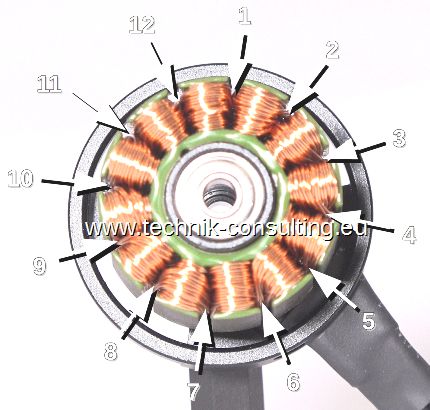
Die Anzahl der Nuten wird bestimmt, indem alle Nuten des Stators abgezählt werden. Der Beispielmotor besitzt demnach 12 Nuten.
Um die Polzahl des Motors zu bestimmen, werden die Magnete gezählt. Diese befinden sich bei einem bürstenlosen Außenläufer in der Glocke. Die Glocke dreht sich am Motor.

In der Glocke des bürstenlosen Außenläufers befinden sich die Magnete. Dieser Motor besitzt 14 Magnete, was 7 Polpaaren entspricht. Die Anzahl der Magnete ist immer gerade.
Der Beispiel-Motor besitzt die Konfiguration „12N14P“. Das „N“ steht für die Anzahl der Nuten und das „P“ für die Anzahl der Pole bzw. Magnete.
2212 bedeutet 22 mm Durchmesser (meistens des Stators, manchmal der Außendurchmesser des kompletten Motors)
Die 12 steht für eine Länge von 12 mm (meistens des Stators, manchmal die Länge des kompletten Motors).
Bei weiteren Fragen, sprechen Sie mit uns.