ESC Motorregler Teststand, Analyse für Quadrocopter
Damit ein Quadrocopter stabil in der Luft bleibt, sind mehrere Bedingungen erforderlich. Unter anderem muss der Antrieb (Motorregler bzw. ESC) genau und schnell auf die entsprechenden Vorgaben bzw. Sollwerte des Flight Controllers (Fluglageregelung) reagieren. Egal ob Streckenflug oder Höhenflug.
Ist die Antriebseinheit (Propeller, Motor, Motorregler) zu langsam oder ungenau, lässt sich ein Quadrocopter nicht in der Luft halten. Das Modell stürzt ab. Um den Motor-Regler (ESC) eines Quadrocopters unter möglichst realen Bedingungen zu prüfen, ist ein entsprechender Teststand notwendig. ESC bedeutet Electronic Speed Controller.
Der Motor-Teststand für einen Außenläufer
Sensoren des Motor-Teststandes
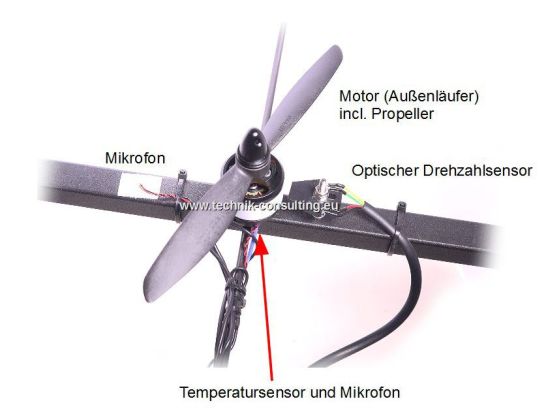
Für die Datenaufzeichnung stehen folgende Sensoren zur Verfügung.Optischer Drehzahlsensor am Motor
Am Motor bzw. der Luftschraubenkupplung befindet sich eine hell/dunkel-Markierung, welche mittels einer Reflexlichtschranke und nachgeschaltetem Verstärker abgetastet wird. Es wurde bewusst kein Drehzahlsensor verwendet, der über die Motoransteuerimpulse arbeitet. Der Motor kann bei einer schlechten Regelung Schritte verlieren und dies würde nicht bemerkt werden.Temperatursensor an den Spulen bzw. Wicklungen
An den Spulen des Motors befindet sich ein kleines NiCr-Ni-Thermoelement mit nachgeschaltetem Messverstärker. Zusätzlich befinden sich weitere NiCr-Ni-Thermoelemente am Motorregler bzw. ESC und dem Akku.Mikrophon an den Spulen bzw. Wicklungen
Im Motor befindet sich ein kleines Mikrophon. Über dieses werden die Laufgeräusche aufgezeichnet. Ein Lagerschaden kann dadurch ebenfalls erkannt werden.Ein weiteres Mikrophon befindet sich außerhalb des Motors knapp unter dem Propeller. Über dieses Mikrophon wird die Geräuschentwicklung des Propeller ermittelt. Dieses Mikrophon ist isoliert gegen Körperschall.
Strommessung mit dem Hall-Effekt
Der Stromfluss zum Motor bzw. vom Motor zurück (beim Bremsen) wird durch einen Stromsensor mit hoher Auflösung und Abtastrate erfasst. Es handelt sich um einen Stromsensor, welcher den Hall-Effekt ausnutzt. Dadurch entsteht kein Spannungsabfall wie bei Einsatz eines Shunts.Spannungsmessung mit Präzisions-Widerstandsnetzwerk
Die Akkuspannung wird über einen A/D-Wandler gemessen. Die Spannung des Akkus ist dazu mit einem Präzisionswiderstandsnetzwerk an den Messbereich des A/D-Wandlers angepasst.Ansteuerelektronik Motoremessstand
Die Ansteuerelektronik schickt entsprechende Ansteuerimpulse an den Motorregler. Über die Drehzahländerung kann direkt ermittelt werden, wie die ESC bzw. der Motorregler reagieren. Dies alles unter nahezu realen Bedingungen mit Motor, Propeller und LiPo-Akku.Besonderheiten des Messaufbaus
Die Daten werden mit einer hohen Datenrate im Mikrosekundenbereich erfasst. Damit die Daten verglichen werden können, ist die Zeitbasis der Datenaufzeichnung mit den Ansteuerimpulsen synchronisiert. Ebenso wie der Sprung im Ansteuersignal.Sicherheitsvorkehrungen Motor-Teststand
Für den Fall der Fälle befinden sich mehrere Sicherheitseinrichtungen an dem Motorprüfstand.- Notschalter, welcher in der Hand gehalten werden muss. Bei Loslassen erfolgt eine sofortige Abschaltung des Antriebs.
- Überstrom-Sicherung. Löst diese Sicherung aus, wird der gesamte Motorkreis spannungsfrei. Die Messung wird weitergeführt, um evtl. Temperaturanstiege weiter erfassen zu können.
- Übertemperatur-Sicherung. Wird Übertemperatur erkannt, wird der Test sofort beendet und die Notaus-Prozedur ausgeführt. Die Temperatur wird an den Motorspulen, dem Motorregler und Akku gemessen.
Prüfprogramm Motor-Teststand
Das Prüfprogramm soll möglichst nahe an der Realität sein. Aus diesem Grund werden folgende Szenarios verwendet:Arbeitspunkte des Motors während der Prüfung
(Leistungen, mit denen der Motor betrieben wird.)- Geringe Leistung (entspricht einem Sinkflug)
- Mittlere Leistung (entspricht einem Schwebeflug)
- Hohe Leistung (entspricht einem Steigflug)
Abweichungen von den Arbeitspunkten
(bzw. Leistungsänderung)- ± 5 %; dies entspricht einer typischen Regelung im Schwebeflug bei Windstille.
- ± 10 %; dies entspricht einer typischen Regelung im Schwebeflug bei etwas Wind.
- ± 20 %; dies entspricht einer Regelung unter erschwerten Bedingungen z.B. stärkerer Wind.
Sprungantworten des Antriebssystems
Der Ablauf der Prüfung ist folgendermaßen:- Motor auf niedrige Drehzahl bringen.
- Motor im Arbeitspunkt, je nach Szenario, betreiben.
- Kurz warten, bis der Motor sicher den Arbeitspunkt erreicht hat.
- Sprung der Motoransteuerung, je nach Szenario, durchführen. Die Datenaufzeichnung ist mit den Ansteuerimpulsen des Reglers synchronisiert.
- Daten weiter aufzeichnen, bis die Sprungantwort des Antriebssystems eingeschwungen ist.
- Weiter mit Punkt 1. bis alle Szenarien durchlaufen sind.
In Summe werden 18 Testszenarios durchlaufen. Der Motor bleibt immer unter einer mittlerer bzw. niedriger Last bei Wechsel der Szenarien.

Bei Bedarf können die Szenarien beliebig angepasst werden. Gemessen werden können Pulse, verschiedene Sprünge, Rampen und Schwingungen im Ansteuersignal. Für eine erste Charakterisierung der Antriebseinheit hat sich jedoch die Sprungantwort mit den 18 Szenarien bewährt.
Nachfolgend einige Diagramme von Antriebssystemen. Die beiden Antriebssysteme unterscheiden sich nur durch den Regler. Propeller, Motor und Akkus sind gleich. Der Ladezustand der Akkus ist ebenfalls gleich. Die Drehzahlen sind nicht identisch, da jeder Regler etwas anders hinterlegte Kennlinien hat.
Einige ausgewählte Regler und Messkurven werden nun vorgestellt. Es handelt sich bei den Motorreglern um die UltraESC 20A sowie den JETI HiCopter 30 opto. Versionen vom Mai 2015.
Als Motor kam ein 2208 Außenläufer mit einem 6 Zoll Propeller
mit 4 Zoll Steigung zum Einsatz. Als Akku wurde ein LiPo mit 2S verwendet.
Niedrige Motorleistung für Sinkflug
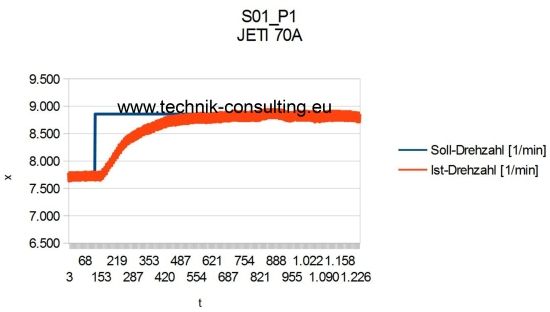
S01 +5% AbweichungDieses Szenario ist wichtig für einen stabilen Sinkflug. Für die ESC bzw. Motorregler und Motor ist aufgrund der geringen Drehzahl die Reaktionszeit meistens etwas langsamer als bei höheren Drehzahlen.
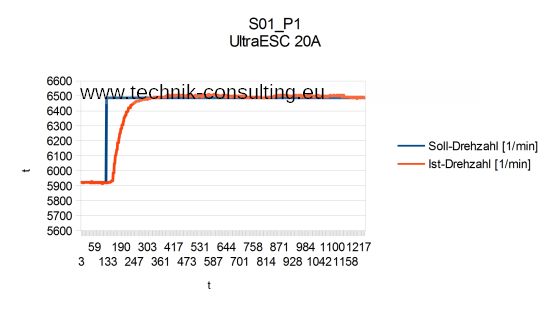
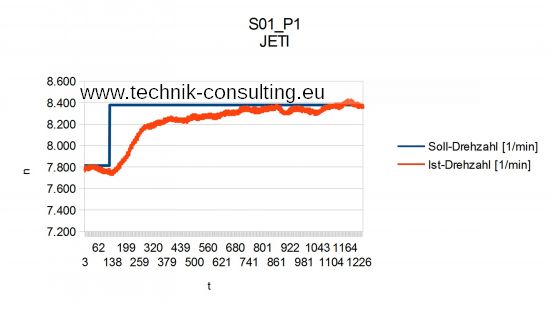
Der im Diagramm oben dargestellte Regler regelt sauber und schnell auf den Sollwert. Bei dem im unteren Diagramm dargestellten Regler fällt eine träge Regelung auf. Die Drehzahlreduktion bei diesem Motorregler direkt nach unten beim anliegen des Sprungs entsteht durch eine unsauberen Regelung mit Schwingungen schon vorher. Der Regler neigt zu leichtem Schwingen. Mit dieser ESC wird ein Quadrocopter nicht ruhig sinken, sondern immer etwas instabil wirken. Für das Szenario S01 (Sinkflug mit geringen Änderungen) ist definitiv der oben dargestellte Motorregler besser.
Mittlere Motorleistung für Schwebeflug
S08 +10% AbweichungDas Szenario S08 ist wichtig für einen stabilen Schwebeflug bei leichtem Wind. Je schneller und exakter der Motorregler ist, umso stabiler steht das Modell in der Luft.
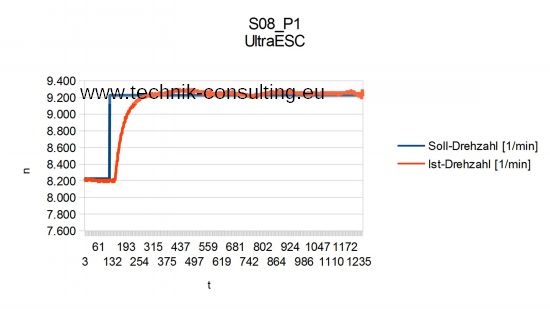
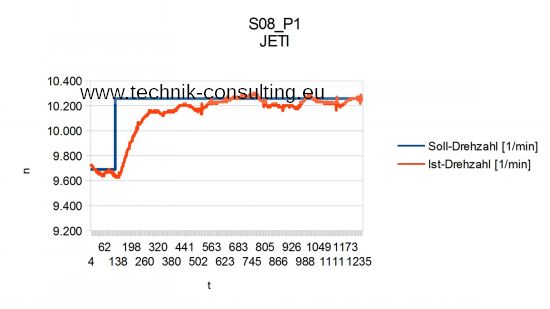
Der oben im Graphen dargestellte Motorregler zeigt ein gutes Regelverhalten im Vergleich zu dem unteren. Beide Regler zeigen leichte Schwingungen, die jedoch bei dem unten dargestellten Regler stärker ausgeprägt sind. Der oben vermessene Motorregler ist zudem schneller und präziser als die unten gezeigte ESC. Bedenken Sie, dass bei der Vermessung nur der Regler getauscht wurde. Der Rest (Motor, Propeller, Akku) blieb gleich.
Für einen stabilen Schwebeflug bei leichtem Wind erscheint der obere Motorregler besser geeignet.
Hohe Motorleistung für Steigflug
S18 -20% AbweichungDas Szenario 18 (kurz S18) ist wichtig bei einem schnellen Steigflug und einer starken Regelung durch die Flight Control z.B. infolge von stärkerem Wind. Hier soll die Motorleistung bei hohem Niveau plötzlich gesenkt werden. Regler die unsauber den Propeller bremsen haben hier ein Problem.
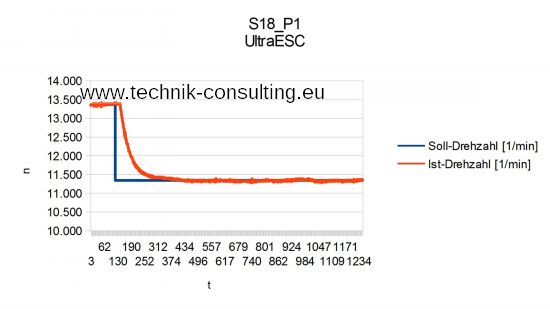
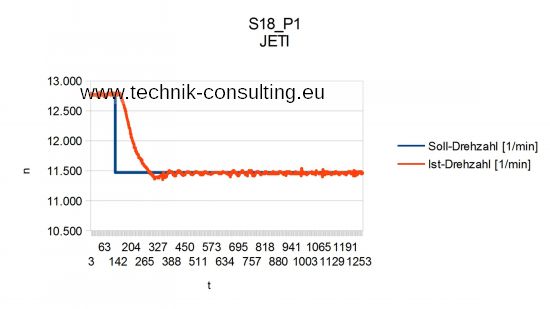
Bei diesem Szenario sind die beiden vermessenen Motorregler nahezu gleich. Der oben gezeigte Motorregler ist etwas präziser, als die unten vermessene ESC. Im Flug werden sich beide Regler bei hoher Leistung und plötzlicher Leistungsreduktion ähnlich verhalten. Die unten dargestellte ESC zeigt noch leichte Regelschwingungen, aber diese dürften im Flug unter diesen Bedingungen nahezu unsichtbar bleiben.
Audioanalyse mittels Frequenzspektrum bzw. Audio-Spektrogramm
Eine weitere Möglichkeit den Motorregler zu analysieren ist die Audioanalyse. Dabei ist folgendes Vorgehen sinnvoll.- Antriebseinheit fest einspannen in einer Vorrichtung (z.B. Schraubstock mit Kunststoff-Backen).
- Wenn Sie ein bereits aufgebautes Modell vermessen wollen, deaktivieren Sie alle Motorregler bis auf einen. Am einfachsten stecken Sie den zu prüfenden Regler an einen freien Empfängerkanal.
- An der Fernsteuerung benutzen Sie einen Schalter um den Sprung zu simulieren. Alternativ können Sie einen modifizierten Servotester benutzen. Bei diesem schalten Sie einen Widerstand parallel zum Poti dazu.
- Nehmen Sie das Propellergeräusch auf.
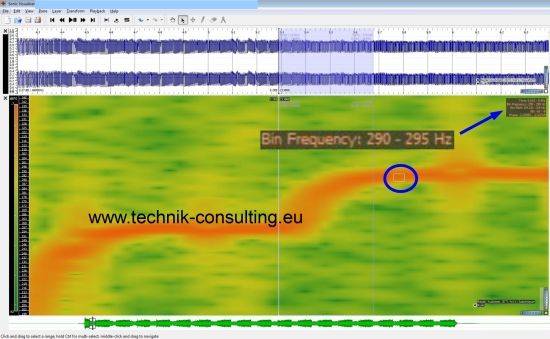
- Anschließend analysieren Sie das Frequenzspektrum.
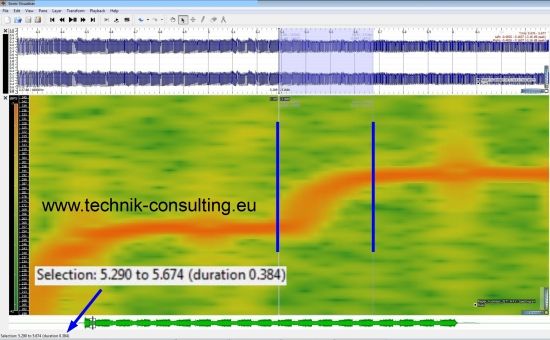
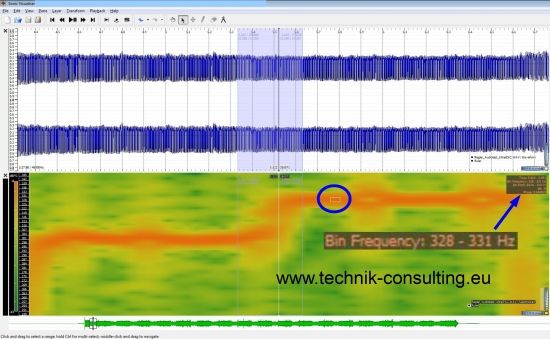
Setzen Sie im Programm entsprechende Marker vor und nach dem Sprung. Messen Sie die Frequenzen aus. Um aus der ermittelten Frequenz auf die Drehzahl zu kommen, multiplizieren Sie diese mit 30. Haben Sie beispielsweise 256 Hz ermittelt, entspricht dies einer Drehzahl von 256 Hz * 30 / (Hz * min) = 7.680 1/min.
Warum mal 30? Wenn Sie einen 2-Blatt-Propeller besitzen, erzeugt dieser pro Umdrehung 2 Signale. Um von Hz (Schwingungen pro Sekunde) auf Umdrehungen pro Minute zu kommen, müssen Sie den Wert mal 60 nehmen. Kurz 60 geteilt durch 2 = 30. Bei einem Drei-Blatt-Propeller entsprechend mal 20.
Audio-Spektrogramm (JETI) niedrige Motorleistung für Sinkflug
S01 +5% Abweichung (mit einem 3S-LiPo-Akku)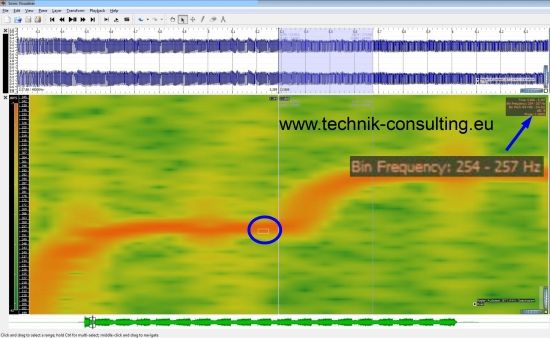
Mit den Werten vom Teststand stimmt das Audio-Spektrogramm gut überein.
Video incl. Spektrogramm des JETI-Reglers
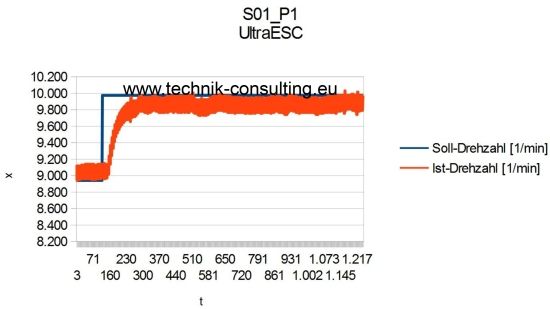
Audio-Spektrogramm (UltraESC) niedrige Motorleistung für Sinkflug
S01 +5% Abweichung (mit einem 3S-LiPo-Akku)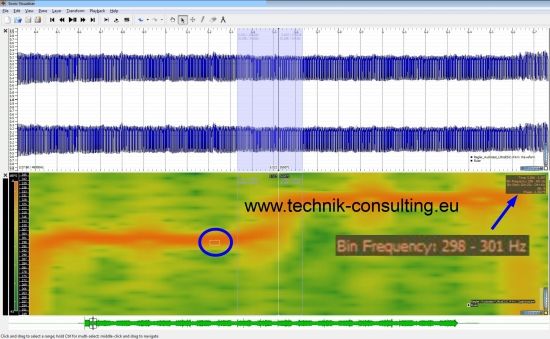
Video incl. Spektrogramm des UltraESC 20A-Reglers
Mit den Werten vom Teststand stimmt das Audio-Spektrogramm gut überein.
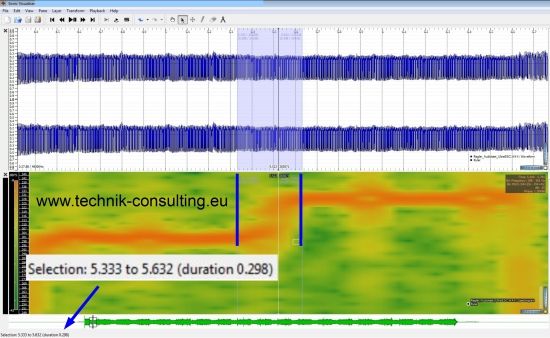
Im Spektrogramm sehen Sie, wie sich die Frequenz ändert. Genau dies ist die Zeit, die die Antriebseinheit benötigt um auf die neue Drehzahl zu kommen. Entsprechende Marker vor und nach dem Sprung ergeben in etwa die Regelzeit. Beachten Sie, dass eine evtl. Totzeit des Reglers bei dieser Methode nicht entdeckt werden kann.
Nachteil an der Audioanalyse mittels Spektrogramm ist der hohe Zeitaufwand und die Fehleranfälligkeit. Vorteilhaft ist die einfache Durchführung.
Zusammenfassung der Testergebnisse Motorregler für Quadrocopter
Sie sehen, wie wichtig ein gut ausgewählter Regler ist. Selbst eine sehr gut arbeitende Flight Control wird mit einem schlechten Motorregler das Flugmodell nicht stabil in der Luft halten können. Beim Schwebeflug wirkt ein Quadrocopter dann unruhig. Die Motorregelung unterliegt gewissen Grenzen. Die Regelung kann nicht beliebig schnell erfolgen, da dann sehr hohe Ströme fließen würden. Aus diesem Grund besitzen die Regler eine kleiner Rampe, die das Ausgangssignal nicht schlagartig ändert. Eine Kunst bei der Optimierung der Motorregler ist die Balance zwischen Regelgeschwindigkeit und Stromfluß.Bei den hier gezeigten Messergebnissen handelt es sich um neutral durchgeführte Tests.
Wenn Sie Ihre Antriebseinheit vermessen lassen oder optimieren wollen, sprechen Sie mit uns. Wir vermessen ebenfalls Servomotoren und Modellbauservos.
Bei weiteren Fragen, sprechen Sie mit uns.