Höhenmessung mittels Bildanalyse einer Drohne
Für viele Modellflug-Piloten ist es interessant zu wissen, wie hoch die Drohne fliegt. Das folgende Video erklärt die Grundzüge des Messverfahrens mittels Bildanalyse.
Die Höhenmessung über Grund ist eine Entfernungsmessung des (senkrechten) Abstands zum Boden. Für diesen Zweck gibt es einige bewährte Sensoren:
Oft verwendet
- Barometrische Höhenmessung
- GPS Höhenmessung
Weniger oft verwendet (Auszug)
- Ultraschall Entfernungsmessung
- Laser Triangulation
- Laser - Entfernungsmessung mittels Laufzeit
Höhenmessung ist auch ohne diese Sensoren möglich
Doch was machen die Piloten, die solche Sensoren nicht im Flugmodell haben? Viele Piloten besitzen eine Digitalkamera die das Modell tragen kann. Für Modellflugzeuge, Drohnen bzw. Hubschrauber darf diese nicht zu groß sein. Eine Aktionkamera wie etwa eine GoPro kann auch von kleineren Drohnen in die Luft gebracht werden. Wenn Sie eine Kamera im Flugmodell mitnehmen, können später mit den Bildinformationen Messungen durchgeführt werden. Die kleine Kamera wird so gedreht, dass die Blickrichtung nach unten ist. Am Boden wird ein Objekt mit bekannten Ausmaßen (z.B. eine Decke) platziert und von der Luft aus aufgenommen. Anschließend wird die Abmessung in Pixel am Computer ermittelt. Aus diesen Daten lässt sich die Flughöhe bzw. der Abstand der Kamera zum Objekt berechnen.

Kamera an einer Drohne, Blickrichtung im Flug nach unten.
Auch die Drohne kann als Messobjekt dienen
Bei größeren Flugmodellen kann die Kamera am Boden positioniert werden. Das Messobjekt wäre dann beispielsweise die Spannweite des Flugzeugs. Bei größeren Höhen (je nach Drohne ab ca. 50 Meter) ist diese Messmethode zu ungenau. Besser ist es die Aktionkamera wie eine GoPro in der Drohne zu transportieren. Das Messobjekt am Boden kann leicht vergrößert und den zu erwartenden Flughöhen angepasst werden als umgekehrt.
Was ist die Höhenmessung mittels Bildanalyse?
Vereinfacht gesagt wird ein bekanntes Objekt als Referenz verwendet und mittels Mathematik der Abstand errechnet.
Vorteile gegenüber herkömmlichen Sensoren zur Höhenmessung
Die Bildvermessung bietet zahlreiche Vorteile gegenüber anderen Sensoren:- Unabhängigkeit gegenüber Satellitenempfang (GPS) und Luftdruckschwankungen (barometrische Höhenmessung).
- Bei richtiger Auslegung (Berechnungen unten) sehr präzise.
- Hohe Messrate, je nach Kamera, möglich. Bis zu 50 Messungen pro Sekunde stellen meistens kein Problem dar.
Um die Höhe der Drohne zu ermitteln, muss die Kamera genau nach unten gerichtet werden. Zusätzlich wird ein Objekt mit bekannten Abmessungen benötigt. Dies kann Notfalls eine Picknickdecke, ein Badetuch oder besser eine runde Tischdecke sein. Wenn sich das Flugmodell über dem bekannten Objekt befindet, ist es mittels einfacher geometrischer Berechnungen möglich den Abstand bzw. Die Höhe auszurechnen. Je weiter der Abstand zum (Mess-) Objekt, umso kleiner erscheint dieses auf dem Bild
Wie klein die Decke mit der Höhe bzw. Entfernung wird, lässt sich berechnen.
Beschreibung der Höhenmessung an einer Drohne
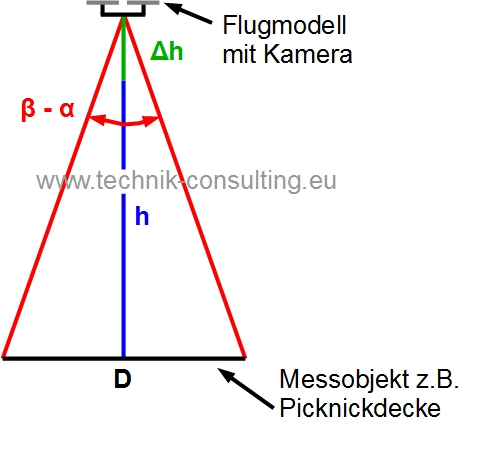
Skizze
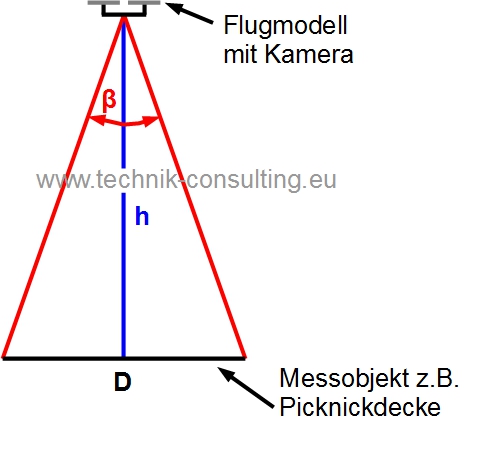
h: Höhe bzw. Abstand der Kamera zum Objekt
ß: Sehwinkel des Objektes
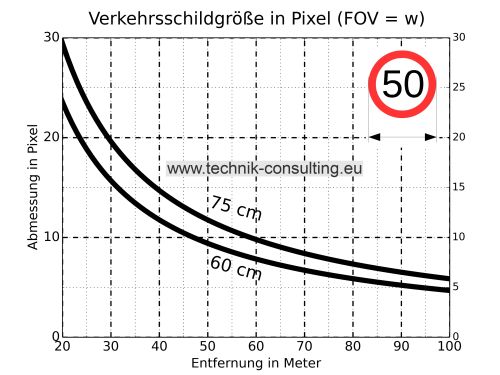
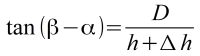
Der mathematische Zusammenhang ist:
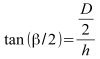
Bei dieser Anordnung lässt sich der Winkel auch folgendermaßen berechnen
Hinweis: Das Dreieck ist nicht rechtwinkelig.
Der Sehwinkel lässt sich aus einem digitalen Bild folgendermaßen berechnen.
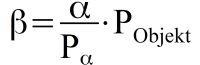
ß: Sehwinkel des Objektes
a: Bildwinkel des Fotoapparates
P_a: Abmessung der Bilddiagonalen der Aufnahme in Pixel (darauf wird der Bildwinkel bezogen.)
P_Objekt: Abmessung des Objektes in Pixel
Den Bildwinkel können Sie bei Fixfokusobjektiven (z.B. GoPro-Kameras) oft aus dem Datenblatt entnehmen.
Besser ist es, wenn Sie den Sehwinkel selber bestimmen. Dies ist nicht schwierig. Der berechnete Sehwinkel wird mit "B" bezeichnet. Folgende Werte können Sie bei einer GoPro 3 bei 1920 Pixel x 1020 Pixel annehmen:
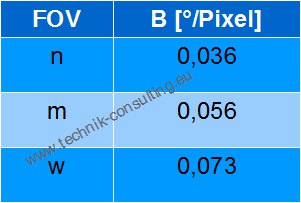
Der Wert "B" gibt an, welchem Sehwinkel ein Pixel in Grad entspricht. Je kleiner dieser Wert, umso größer erscheint das Objekt im Bild.
Kamera als Entfernungsmesser
Aufgrund von Toleranzen bei der Herstellung ist es jedoch besser den Bildwinkel Ihrer Kamera selbst zu bestimmen und daraus den Wert "B" zu berechnen.Gehen Sie folgendermaßen vor:
Suchen Sie sich ein Objekt dessen Größe und Entfernung Sie kennen und machen Sie ein Bild davon. Gut geeignet ist z.B. ein rundes Verkehrsschild, ein rechteckiger Fensterrahmen oder ein anderes kontrastreiches Objekt. Messen Sie dieses aus und fotografieren Sie dieses Objekt aus einer bekannten Entfernung. Eine Videoaufnahme ist ebenfalls möglich wenn Sie später Standbilder erzeugen. Achten Sie darauf, dass sich das Objekt in etwa in der Mitte der Aufnahme befindet. Einige Objektive verzerren das Bild im Randbereich, weshalb dieser ungeeignet ist.
Für die Berechnung gilt folgende Gleichung. Genau diesen Wert rechnen Sie aus oder benutzen die Tabelle weiter unten.
Ein Fensterrahmen mit 85 cm besitzt bei einer Entfernung von 30 Meter auf dem Bild 34 Pixel ? 0,048 °/Pixel. Diesen Wert bezeichnen wir mit B. B ist von Kamera zu Kamera unterschiedlich und sollte am Anfang immer ermittelt werden.
Vertrauen Sie dieser Art der Höhenmessung
Durch die Messungen von bekannten Objekten gewinnen Sie schnell Vertrauen in diese Messmethode. Den Abstand bzw. die Höhe bestimmen Sie mit folgender Formel. Achten Sie bei der Berechnung mit einem Taschenrechner darauf, dass die Winkelfunktion auf Grad eingestellt ist („DEG“).Einfache Berechnung des Abstandes bzw. der Höhe
B: Der Sehwinkel eines Pixels. Abhängig vom Aufnahmesystem. Die Berechnung ist weiter oben erklärt.
P_Objekt: Abmessungen des bekannten Messobjekts in Pixel
D: Die Abmessung des bekannten Messobjekts in Meter.
Das Messobjekt kann eine runde Tischdecke oder ähnliches sein. Notfalls auch ein Handtuch, die Straßenbreite, ein Auto etc. . Flache Objekte eignen sich besser als hohe.
Somit können Sie einfach die Höhe Ihres Fluggerätes (z.B. Drohne, Quadrocopter, Hubschrauber oder Flugzeug) errechnen. Dies funktioniert auch umgekehrt, wenn Sie Ihr Fluggerät vom Boden aus fotografieren. Leider sind die Grenzen bei kleinen Modellen schnell erreicht, weswegen sich bei größeren Entfernungen (ca. ab 50 Meter, je nach Modell) der umgekehrte Weg besser eignet. Sie können das Objekt ab Boden beliebig vergrößern und so zusätzlich die Genauigkeit der Messung erhöhen.
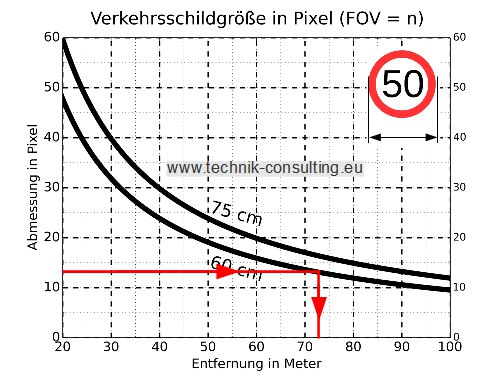
Diagramme für GoPro 3 Kamera ale Entfernungs bzw. Höhenmesser
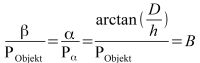
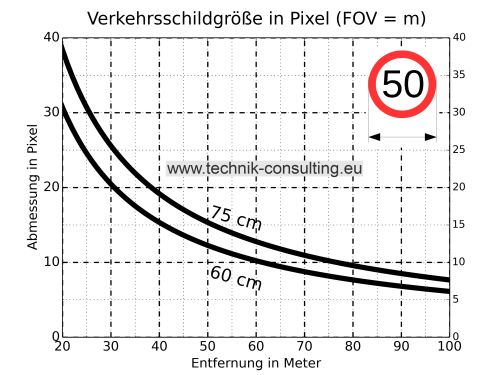
GoPro 3 Diagramme für ein Verkehrsschild bei unterschiedlichen FOV Einstellungen. Bildauflösung 1920 Pixel x 1080 Pixel. Probieren Sie es selbst und vergleichen die Werte.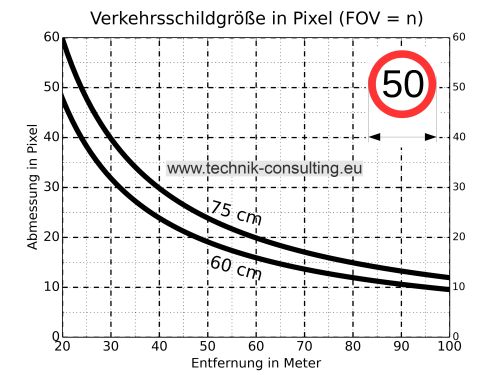
Beispielaufnahme Verkehrsschild mit GoPro
Entfernung 79 Meter zu einem Verkehrsschild mit 60 cm Durchmesser.
GoPro 3 Einstellungen: 1920 Pixel x 1080 Pixel; FOV: n (narrow)
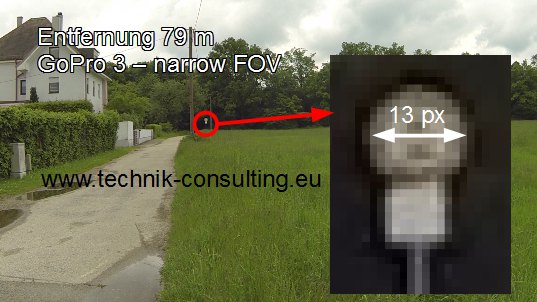
Aus dem Bild ergibt sich eine Pixelbreite von ca. 13 Pixel.
Messgenauigkeit der Entfernungs bzw. Höhenmessung
Passen das Messobjekt und die Entfernung bzw. Höhe nicht zusammen, ist die Messgenauigkeit eingeschränkt. Hat das Messobjekt auf dem Bild nur noch wenige Pixel Ausdehnung, ist die Messunsicherheit groß.Die kleinste Messeinheit ist ein Pixel. Dies wird durch B ausgedrückt. Je größer die Ausdehnung des Messobjektes in Pixel, um so präziser ist die Messung.
Wie präzise Sie messen können ist berechenbar.
Im besten Fall kann das Objekt auf ein Pixel genau ausgemessen werden. Dies ist die maximale Auflösung bei der Messung. Interpolationen zwischen Pixeln werden nicht berücksichtigt.
Diese Gleichung lässt sich nach D nicht analytisch auflösen. Die numerische Lösung funktioniert immer und wird später gezeigt. Um dennoch zu einer brauchbaren Formel zu gelangen, werden Näherungsverfahren verwendet.
Einfache Formel für die Toleranzberechnung ermitteln
Für kleine Winkel können die Winkel als Näherungsfunktionen aus der Taylor-Reihe dargestellt werden.Damit lässt sich die obige Formel folgendermaßen vereinfachen:
Nach Umformung und Umrechnung der Winkel in Bogenmaß (wegen der Näherungsformel):
h: Höhe bzw. Abstand der Kamera zum Objekt
?h: Gewünschte Auflösung
B: Sehwinkel eines Pixels
Beispiel GoPro 3 (FOV: m)
Bei einem Pixel Auflösung, einem Meter Messgenauigkeit und einer Höhe von 100 Meter ergibt sich eine minimale Objektabmessung am Boden von 9,6 Meter.
Das Messobjekt sollte kreisrund sein. Abweichungen von der Kreisform sind einfach zu erkennen. Diese kommen vor bei:
- Bildfehlern (meist durch Vibration, Fischaugenobjektiv im Randbereich).
- Keine genaue Positionierung über dem Objekt, besonders bei einem Fischaugenobjektiv.
Die Näherungsformel ist für praktische Zwecke vollkommen ausreichend.
Wenn sich eine Drohne in 100 Meter Höhe befindet und Sie mit der GoPro-Kamera (FOV: m) auf einen Meter genau messen möchten folgt: Das Messobjekt muss mindestens eine Größe von 9,6 Meter besitzen. In Grenzbereichen kann einfacher bei runden Objekten ein Mittelwert gefunden werden, wenn der Durchmesser aus verschiedenen Winkeln ausgemessen wird.
Höhen-Messungen mit einem Fischaugen-Objektiv
Befindet sich die Drohne nicht genau über dem runden Messobjekt, sollte immer die lange Seite des Messobjekts verwendet werden. Dies trifft bei Fischaugen-Objektiven besonders zu.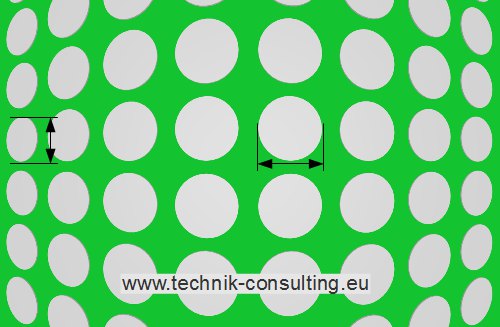
Beispiel: Runde weiße Tischdecken auf einer Wiese.
Besser die längere Seite verwenden, wenn sich das Messobjekt nicht in der Mitte befindet.
Besser die längere Seite verwenden, wenn sich das Messobjekt nicht in der Mitte befindet.
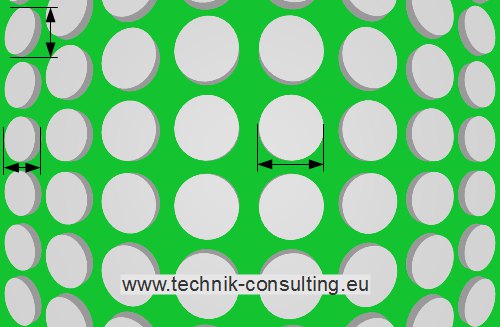
Bei in der Höhe ausgedehnten Messobjekten kann es zu Fehlmessungen kommen. Die Messungen links im Bild messen nicht den Durchmesser, sondern enthalten auch teilweise die Höhe des Messobjektes. Dadurch entstehen Messfehler.
Mit den folgenden Diagrammen können Sie die minimale Objektgröße je nach Entfernung und Einstellung der GoPro 3 Kamera einfach ermitteln. Die Bildauflösung der Kamera muss dazu auf 1920 Pixel x 1020 Pixel eingestellt werden.
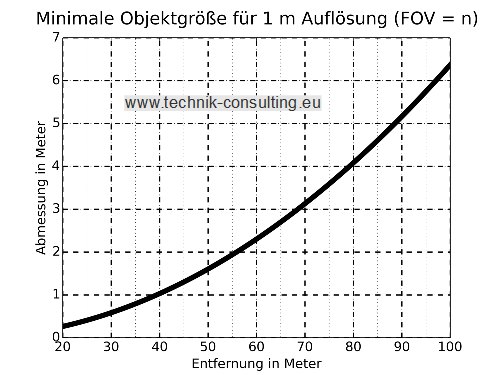
Wenn Sie bei 80 Meter Entfernung und einem FOV (GoPro 3) von n noch auf 1 Meter genau messen möchten, sollte das Messobjekt mindestens 4 Meter groß sein.
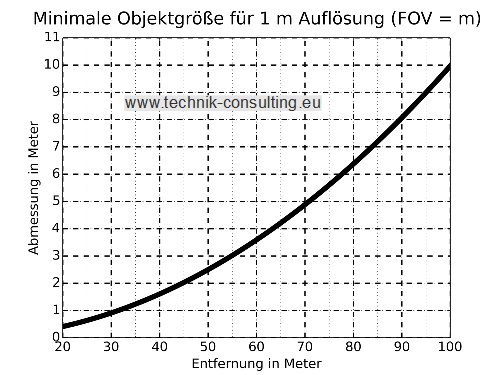
Wenn Sie bei 80 Meter Entfernung und einem FOV (GoPro 3) von m noch auf 1 Meter genau messen möchten, sollte das Messobjekt mindestens 6 Meter groß sein.
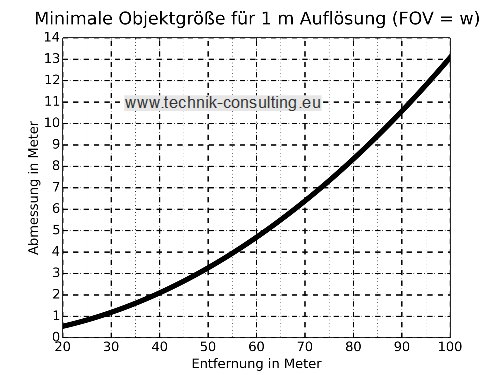
Wenn Sie bei 80 Meter Entfernung und einem FOV (GoPro 3) von w noch auf 1 Meter genau messen möchten, sollte das Messobjekt mindestens 8 Meter groß sein.
Kameraeinstellungen für optimale Höhenmessung
Je nach Digitalkamera ist es möglich den Bildwinkel zu verändern. Einerseits über optischen Zoom, andererseits über den Sensor selbst. Letzteres wird z.B. bei der GoPro Aktionkamera verwendet. Je nach Kameraeinstellung an der GoPro verändert sich somit der Bildwinkel (FOV – Field of view).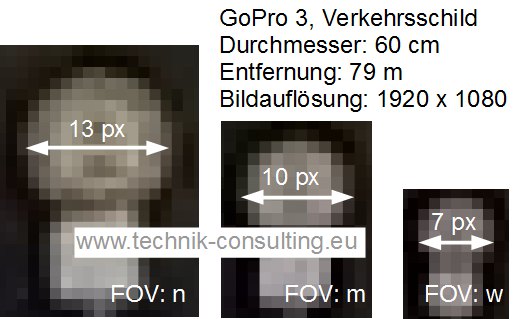
Beispielbilder bei gleicher Entfernung und unterschiedlichen Einstellungen.
Die Abstandsmessung mittels Bilderanalyse besitzt eine hohe Präzision und Messrate. Mit einer GoPro Actionkamera können problemlos 50 gute Bilder pro Sekunde aufgenommen werden. Dies entspricht einer Messzeit von 20 ms. Die hohe Genauigkeit bei hoher Messfrequenz ermöglicht es, weitere interessante Parameter zu bestimmen.
Messung der Aufstiegsgeschwindigkeit
Wenn von einer Drohne oder Modellhubschrauber die Aufstiegsgeschwindigkeit bestimmt werden soll, lässt sich dies mit der Bildanalyse ebenfalls ermitteln. Lassen Sie das Flugmodell über dem Messobjekt (z.B. eine runde Picknickdecke) schweben und anschließend senkrecht nach oben steigen. Messen Sie zu bestimmten Zeiten die Höhe und Sie können die Steiggeschwindigkeit ermitteln. Damit die Bildauswertung sicher ist, empfiehlt es sich vor der Weiterverarbeitung des Videos die Bildnummern bzw. die Zeit einzublenden. Damit kann jedes Standbild später eindeutig identifiziert werden.Messung der vertikalen Beschleunigung
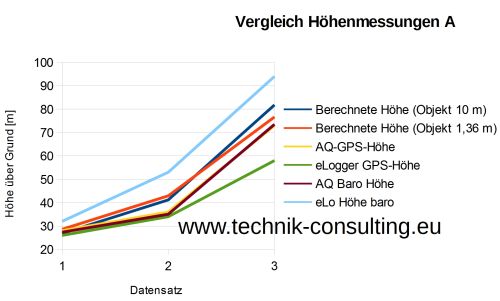
Durch die hohe Messrate bei der Bildaufzeichnung kann neben der Geschwindigkeit auch die Beschleunigung berechnet werden. Dazu wird die Aufstiegsgeschwindigkeit des Flugmodells zu verschiedenen Zeiten berechnet. Über die Veränderung der Geschwindigkeit über die Zeit ist es einfach möglich die Beschleunigung zu errechnen.Vergleich verschiedener Höhenmessungen
Nachfolgen werden verschiedene Messwerte gegenüber gestellt.Es wurden folgende Sensoren verwendet:
- Höhenmessung mittels Bildanalyse (Objektgröße 10 m)
- Höhenmessung mittels Bildanalyse (Objektgröße 1,36 m)
- AutoQuad GPS-Höhe
- eLogger GPS-Höhe
- AutoQuad Barometer
- eLogger Barometer
| Datensatz A - Messung (Höhe über Grund) | 1 | 2 | 3 |
|---|---|---|---|
| Berechnete Höhe (Objekt 10 m) | 27 m | 41 m | 82 m |
| Berechnete Höhe (Objekt 1,36 m) | 29 m | 43 m | 77 m |
| AQ-GPS-Höhe | 28 m | 36 m | 73 m |
| eLogger GPS-Höhe | 26 m | 34 m | 58 m |
| AQ Baro Höhe | 27 m | 35 m | 73 m |
| eLo Höhe baro | 32 m | 53 m | 94 m |
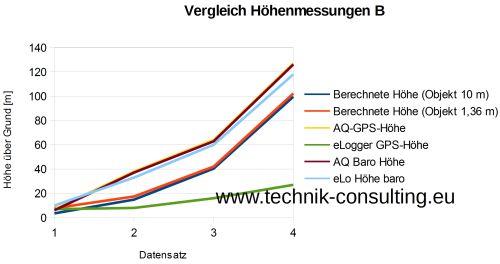
| Datensatz B - Messung (Höhe über Grund) | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Berechnete Höhe (Objekt 10 m) | 4 m | 15 m | 40 m | 100 m |
| Berechnete Höhe (Objekt 1,36 m) | 8 m | 17 m | 42 m | 102 m |
| AQ-GPS-Höhe | 7 m | 38 m | 64 m | 127 m |
| eLogger GPS-Höhe | 7 m | 8 m | 16 m | 27 m |
| AQ Baro Höhe | 6 m | 37 m | 63 m | 126 m |
| eLo Höhe baro | 10 m | 33 m | 60 m | 118 m |
Bei den Sensoren besteht eine große Toleranz, obwohl die Messungen zur selben Zeit in der Drohne durchgeführt wurden.
Fazit Höhenmessung mittels Bildanalyse bei einer Drohne
Sie sehen, dass mit einem einfachen Video viele Daten über die Drohne gewonnen werden können. Egal ob Drohne, Hubschrauber oder Flugzeug. Die Messung ist einfach nachvollziehbar und bei korrekter Ausführung genau und schnell. Die Messung kann erfolgen, sobald eine Sichtverbindung zum Messobjekt besteht. Unabhängig von schlechtem GPS-Empfang oder Problemen bei der barometrischen Messung. Für eine genaue barometrische Höhenmessung muss übrigens nicht nur das Wetter mitspielen, auch der Sensor muss so verbaut sei, dass Fahrtwind oder Wind allgemein keine Auswirkung hat. Der große Nachteil bei der Bildauswertung ist, dass diese erst nach dem Flug durchgeführt werden kann. Wenn an der Drohne keinerlei Sensoren angebracht sind, ist die Analyse der Bilddaten eine einfache Möglichkeit die Flughöhe der Drohne, Hubschraubers oder Flugmodells zu bestimmen. Entfernungsmessungen für weitere Zwecke sind ebenfalls möglich. Mit der Bildanalyse können Sie ebenfalls überprüfen, ob vorhandene Sensoren richtig arbeiten. Gerade unter ungünstigen Bedingungen liefern diese unbrauchbare Werte. Denken Sie an GPS-Höhenmessungen in der Nähe von hohen Gebäuden oder in Gebirgstälern. Die Bildaufzeichnung kann sofort nach dem Einschalten der Kamera erfolgen. Warten auf gültige GPS-Signale entfällt.Jedes Messverfahren hat Vorteile und Nachteile. Welche überwiegen, hängt immer vom zu erwartenden Einsatzszenario ab.
Die Vorteile der Höhenmessung mittels Bildanalyse sind
- Keine Abhängigkeit von GPS-Signalen. Insbesondere bei schlechten Empfangsbedingungen.
- Keine Abhängigkeit von Luftdruckschwankungen durch Wetteränderung bzw. Fahrtwind.
- Mit einem gut gewählten Messobjekt sehr präzise.
- Fehlererkennung (z.B. bei schlechtem Bild) möglich.
- Hohe Messraten von über 50 Hz möglich.
Die Nachteile sind
- Eine Kamera muss meistens mitgeführt werden (Zusatzgewicht). Alternative, die Drohne wird vom Boden aus aufgenommen.
- Nur präzise Ergebnisse bei Fischaugen-Objektiven, wenn senkrecht über dem Messobjekt.
- Die Höhendaten stehen nicht sofort zur Verfügung.
- Bei Zoom-Objektiven muss ein fester Zoom-Wert eingestellt bleiben.
Gute Messobjekte
- Das Messobjekt sollte immer flach sein. Bei hohen Messobjekten können Messfehler bei schrägem Blickwinkel entstehen.
- Ein Ring ist besser als ein Kreis. Die Mitte eines breiten Streifens kann leichter ermittelt werden, als der Rand eines Kreises.
- Kontrastreich zur Umgebung.
- Matte Oberfläche. Eine glänzende Folie kann die Umgebung widerspiegeln und Messfehler verursachen.
- Symmetrisch, am besten kreisrund. Fehler z.B. Verzerrungen können so erkannt werden.
- Ausreichen groß. Je größer das Messobjekt umso besser die Höhen-Auflösung. Es können sich mehrere Messobjekte (z.B. Ringe) ineinander befinden um verschiedene Höhen mit hoher Auflösung abzutasten. Ein großer Ring wird beispielsweise bei einer geringen Höhe nicht erfasst.
Wir unterstützen Sie gerne bei Ihren Messaufgaben.
Sprechen Sie mit uns.