PID-Regler einer Drohne richtig einstellen
Guter Schwebeflug und schlechter Schwebeflug
Drohnen fliegen nicht eigenstabil, sondern benötigen eine Fluglageregelung. Ist diese gut eingestellt, fliegt die Drohne stabil, ansonsten nicht. Wie Sie die PID-Regler einstellen können, wird an einem Quadrocopter demonstriert. Andere Flugmodelle können Sie analog einstellen. Gut funktionierende PID-Regler ermöglichen erstaunliche Höhenflüge und maximale Reichweiten. Typischerweise wird die Drohne dabei von einem brushless Motor angetrieben.Innovative Drohnentechnologien sind damit ebenfalls möglich.
Alle Angaben ohne Gewähr und unter Ausschluss jeglicher Haftung.
Die Merkmale eines guten Schwebeflugs sind:
- Die Drohne ist stabil in der Luft und macht den Eindruck als wäre es durch nichts aus der Ruhe zu bringen.
- Bei Störungen wie z.B. durch eine Windböe reagiert die Drohne so, dass nur minimale Auslenkungen erkennbar sind.
- Lange Flugzeit bzw. geringer Stromverbrauch der Motoren. Punkt 1 und 2 kann auch mit einer mittelmäßigen Regelung erreicht werden, welche die Motoren zu stark regelt und entsprechend viel Energie benötigt.
Die oben genannten Punkte sind je nach Einsatzzweck entsprechend zu gewichten. Ein Kunstflieger wird mehr Wert auf Punkt 1 und 2 legen als jemand der einen Schwebeflug-Rekord brechen möchte. Die PID-Werte hängen somit auch mit dem Anwendungsfall des Copters zusammen.
Der PID-Regler in einer Drohne
Für die Fluglageregelung bei Drohnen wird gerne eine PID-Regelung verwendet. Dies ist ein Programm im Flugmodell, welches die Sensordaten auswertet und die Motoren entsprechend über Motorregler ansteuert. PID steht für: proportional–integral–derivative und wird später erklärt.Drohne festhalten

Hinweis: Wenn Sie die Drohne festhalten, verändern Sie dessen Eigenschaften für den Regler. Wenn Sie die Drohne beispielsweise sehr fest halten, wirkt dies für den Regler wie eine träge Drohne. Halten Sie die Drohne am Anfang richtig fest und wenn Sie ein gutes Gefühl haben, lösen Sie den Griff langsam. Der Quadrocopter bzw. Drohne wird nie losgelassen. Der P-Regler reagiert besonders empfindlich auf die Stärke des Griffs. Im Zweifel halbieren Sie den ermittelten Wert nochmals.
Die Drohne wird bei den Tests bewusst an die Stabilitäts - Grenze gebracht. Die Drohne wird dadurch nicht beschädigt, sofern es gut gehalten wird und vernünftige Komponenten eingebaut sind.
Einstellen der PID-Regler
Als erstes setzen Sie alle Reglerparameter auf null, was einem Ausschalten der Regler gleichkommt. Nacheinander stellen Sie die P, D und I Parameter ein. Notieren Sie sich die maximalen Werte, welche bei den Tests ermittelt werden. Diese Werte dürfen Sie nie überschreiten. Die ermittelten Werte sind eine Basis für weitere Optimierungen.Hinweis: Jeder Regler hat einen Punkt an dem er optimal arbeitet. Dieser Punkt wird als Arbeitspunkt bezeichnet. Den Arbeitspunkt müssen Sie ebenfalls erreichen. Im Normalfall müssen Sie also mindestens so viel Schub geben, dass die Drohne schweben kann.
Wenn die Drohne halbwegs symmetrisch (von oben gesehen) aufgebaut ist, können Sie die Roll- und Pitch-Werte der Regler gleichsetzen. Ist die Drohne unsymmetrisch aufgebaut z.B. unterschiedlich lange Arme, sollten die Roll- und Pitch-Regler separat eingestellt werden.
Der Yaw-Regler muss separat eingestellt werden, am besten zum Schluss wenn die Roll- und Pitch-Regler passen. Der Yaw-Regler wird mit sehr hoher Wahrscheinlichkeit andere Werte benötigen, als Pitch und Roll!
Zur Erinnerung
- Pitch-Achse: Die Drohne kippt nach vorne bzw. hinten, deswegen auch Nickachse genannt.
- Roll-Achse: Die Drohne kippt nach links bzw. rechts.
- Yaw-Achse: Die Drohne dreht sich von oben gesehen im bzw. gegen den Uhrzeigersinn.
Fangen Sie mit Pitch und Roll gleichzeitig bei einer symmetrischen Drohne an. Erst P, dann D und evtl. I.
Danach den Yaw-Regler genauso einstellen.
Ermittlung P-Anteil und was passiert bei falsch eingestellten Werten
Der P-Regler, bei manchen Drohnen auch Gain-Wert genannt, ist der wichtigste Regler des Flugmodells. Wie der Name vermuten lässt, erfolgt die Regelung proportional zu den Sensordaten. Betrachten Sie zum besseren Verständnis das folgende Modell.
Ist der P-Wert zu gering, kann die Drohne keine stabile Fluglage halten, da der Regler nicht stark genug eingreift. Die Drohne fliegt instabil. Am Motorengeräusch können Sie eine träge Regelung heraushören.
Ist der P-Wert zu hoch, oszilliert die Drohne, da die Motoren bei kleinen Lageänderungen maximal gegensteuern. Im Extremfall schalten die Motoren zwischen Stillstand und maximaler Drehzahl viele Male pro Sekunde hin und her. Die Drohne ist auch hier instabil und nicht mehr steuerbar. Ein Absturz ist die Folge.
Um einen guten P-Wert zu ermitteln, erhöhen Sie diesen schrittweise, bis die in der Hand gehaltene Drohne anfängt zu oszillieren. Danach setzen Sie diesen Wert auf etwa 50%. Die Drohne wird dann auf Fluglageänderungen entsprechend stark reagieren. Stellen Sie den P-Wert lieber zu niedrig ein, als zu hoch. Ein zu hoher P-Wert (=oszillieren) führt zum Absturz des Copters. Einen Copter mit zu niedrig eingestelltem P-Regler können Sie meistens noch halbwegs landen.
Ermittlung D-Anteil und was passiert bei falsch eingestellten Werten
Das D bedeutet “derivative”, was auf Deutsch “Ableitung” bedeutet. Je stärker die Signalveränderung, umso stärker greift dieser Regler ein. Der Signalwert spielt keine Rolle, sondern nur die Veränderungsgeschwindigkeit.Der D-Wert ist für schnelle Korrekturen notwendig. Stellen Sie sich eine Windböe vor. Die Drohne wird dadurch schnell gedreht. Der P-Regler wird jedoch erst bei größeren Auslenkungen genügend Leistung freisetzen um die Drohne wieder zurück zu holen. Der D-Regler reagiert nur auf Änderungen der Sensordaten. Je schneller sich die Sensordaten verändern, um so stärker greift dieser Regler ein.
Zur Veranschaulichung betrachten wir wieder unser Modell. Stellen Sie sich den D-Regler als flexible Stange (gelb in der Animation) mit einem kleinen Gewicht (grüner Punkt in der Animation) am Ende vor. Neigt sich das Modell nach links, spricht der Regler an und verringert die Motorleistung des rechten Motors. Behalten Sie das kleine Gewicht an der Skala im Auge. Der D-Wert des Reglers entspricht der Stärke der Veränderung.

Erhöhen Sie den D-Wert schrittweise, bis die Drohne anfängt schnell und mit kleiner Amplitude zu oszillieren. In diesem Moment ist die Verstärkung zu hoch und es werden auch Störsignale verstärkt. Am Motorengeräusch können Sie eine Art „Zwitschern“ heraushören. Dies kostet viel Akkuenergie und verringert die Flugzeit drastisch.
Setzen Sie den D-Wert auf 50% des ermittelten Grenzwertes.
Ermittlung I-Anteil und was passiert bei falsch eingestellten Werten
Das "I" kommt von "Integral" und bedeutet schlicht das Aufsummieren des Sensorsignals über die Zeit.Der I-Regler verändert die Motorleistung kontinuierlich in Abhängigkeit des Auslenkwinkels und der Zeit. Der I-Anteil ist für Korrekturen notwendig, bei denen, trotz optimal eingestellter P und D Regler, das Flugmodell nicht gerade in der Luft schwebt. Typisch hierfür ist sind ein nicht optimaler Schwerpunkt der Drohne oder aerodynamische Einflüsse bei schnellen Flügen.
Ist der I-Wert zu hoch eingestellt, beginnt die Drohne zu oszillieren, ähnlich wie bei einem zu hoch eingestelltem P-Wert. Lassen Sie den I-Wert möglichst klein.
Gedächtnisstütze für die PID-Regelung
Über die Regler können folgende Aussagen gemacht werden:| Regler | Beschreibung | Wirkung |
|---|---|---|
| P-Regler | Wirkt proportional zum Sensorsignal. | In der Gegenwart. |
| I-Regler | Verändert fortlaufend die Leistung, je nach Abweichung und verstrichener Zeit. | Bezieht Störungen aus der Vergangenheit (z.B. Zusatzgewicht) mit ein. |
| D-Regler | Wird nur bei schnellen Änderungen aktiv. | Wirkt in die Zukunft und versucht bei schnellen Änderungen "vorausschauend" zu reagieren. |
Gut eingestellte Regler
Wenn alle drei Regler in Betrieb sind, fliegt die Drohne stabil, auch bei Störungen. Das hier angegebene Verfahren stellt die Regler so ein, dass die Drohne in der Luft bleibt. Die 50% Regel (=50% vom Maximalwert) führt bei den meisten Flugmodellen zu einem guten ersten Ergebnis, hängt jedoch von vielen Faktoren ab. Seien Sie immer vorsichtig mit neu eingestellten Reglern und fliegen Sie erst ein paar langsame Runden knapp über dem Boden. Sie kennen gleichzeitig auch die Grenzen der Regler, welche Sie nie überschreiten dürfen. Bleiben Sie immer mit ausreichender Reserve unter den Grenzwerten. Ansonsten kann bereits ein Flugakku mit anderem Gewicht die Drohne instabil machen.Die Grenzen sollten Sie neu ermitteln, wenn:
- Die Drohne umfassend geändert wurde (z.B. Kabelquerschnitte, geänderte Massenverteilung, Ausleger)
- Andere Motoren, Motorregler oder Luftschrauben eingesetzt werden.
- Andere Flugakkus (Spannung, Gewicht, Innenwiderstand)
Beachten Sie auch, dass sich die oben ermittelten Grenzen im Flug etwas verschieben, da
- die Akkuspannung sinkt, wodurch die Motoren auf die Regelung etwas schwächer ansprechen.
- Bei schnelleren Flügen ändert sich der Arbeitsbereich der Propeller. Die Motoren drehen insgesamt schneller.
- Aerodynamische Verhältnisse beeinflussen das Regelverhalten im Flug. Eine Drohne welches wie ein Segel wirkt beeinflusst die Grenze im Flug stärker.
- Temperatur der Komponenten. Ein kalter Akku ist beispielsweise weniger belastbar, als ein warmer.
Bleiben Sie deshalb immer mit Reserve unter den Grenzwerten der PID-Regler.
Haben Sie die oben genannten Schritte durchgeführt, bedeutet dies nicht, dass die Regler schon optimal arbeiten. Weitere Optimierungen müssen durch Beobachtung im Flug gemacht werden.
Einfliegen
Für das Einfliegen der Drohne beachten Sie folgende Hinweise- Ausreichend Abstand (mindestens 50 Meter) zu Personen und Gebäuden.
- Eine Wiese mit hohen Gras ist optimal. Eine kleine Fläche zum Starten und Landen sollte vorhanden sein.
- Fliegen Sie anfangs nur ein paar "Hüpfer" mit einigen Sekunden Flugdauer und unter einem Meter Flughöhe.
- Fliegen Sie anfangs (wenn Sie meinen die Regler passen) nur knapp (= max. ein Meter) über dem Boden
- Wenn möglich schauen Sie sich anschließend die Logfiles an, ob die Regler in die Sättigung laufen. Erkennbar am abschneiden der Werte. Ist dies der Fall, die Regelparameter reduzieren.
- Windstill
- Wenn die Drohne unkontrollierbar wird oder sich aufschaukelt, sofort landen, notfalls Gas ganz zurücknehmen.
- Machen Sie kleine Fortschritte. 3D-Kunstflug mit schlecht eingestellten Reglern ist teuer.
- Bleiben Sie gelassen. Wild am Knüppel steuern ist schlechter als ruhig das Gas wegnehmen.
Hinweis: Wenn Ihre Drohne (ohne GPS) nach dem Loslassen des Steuerknüppels im Pitch- oder Horizont-Mode in waagerechter Lage weiterfliegt ist dies normal. Für den Regler ist die Drohne gerade. Das es sich gegenüber dem Grund bewegt, merkt der Regler nicht.
Weitere typische Fehlerquellen sind
- Sensoren nicht kalibriert.
- Sensoren sind nicht fest mit dem Rahmen verbunden. Auch Gummidämpfer sind ungeeignet.
- Sensoren falsch eingebaut.
- Motorenanordnung und Einstellungen in der Software passen nicht zusammen.
- Drohne ist zu schwer bzw. untermotorisiert.
- Sofort extreme Manöver, ohne sich an die Grenzen heranzutasten.
- Schlechter bzw. instabiler mechanischer Aufbau.
Sollte die Drohne wirklich einmal abstürzen, nicht aufgeben. Das passiert jedem mal - meistens später beim Experimentieren.
Optimierung im Flug
Ein paar Regeln für die Optimierung im Flug:Drohne reagiert träge und schwebt schlecht bzw. instabil (z.B. tanzt, taumelt)
P-Wert rauf und D-Wert runter evtl. auch I-Wert runter. Der P-Wert darf dabei keinesfalls über der oben ermittelten Schwelle liegen.
Beim Schwebeflug driftet die Drohne ab
I-Wert und evtl. P-Wert erhöhen.
Bei schnellen Flügen beginnt die Drohne langsam zu oszillieren
I-Wert zu hoch oder zu niedrig – je nach Drohne.
Drohne oszilliert leicht bei Störungen (z.B. anstupsen oder Windböe)
D-Wert runter
Drohne reagiert zu langsam auf Störungen (z.B. anstupsen oder Windböe)
D-Wert und evtl. P-Wert erhöhen.
Drohne Schwerpunkt ermitteln
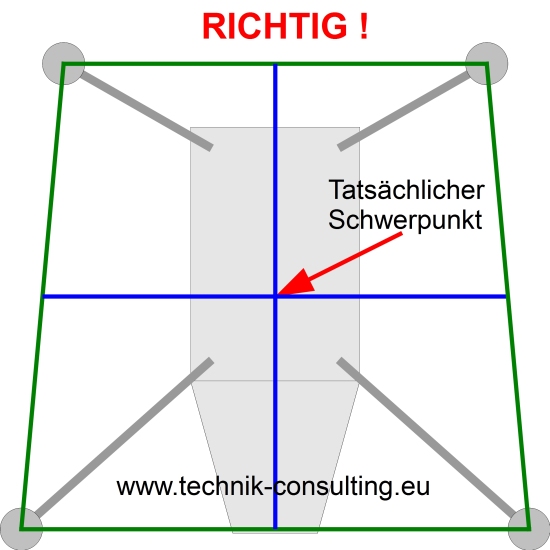
Wenn Ihre Drohne nicht stabil zu fliegen ist, sollten Sie den Schwerpunkt überprüfen. Je nach Drohne und Regelung kann ein schlechter Drohnenschwerpunkt die Drohne instabil werden lassen. Der Schwerpunkt befindet sich genau in der Mitte zwischen den Motoren. Manchmal wird der Schwerpunkt mit der „Diagonalmethode“ ermittelt. Diese liefert jedoch nicht bei allen Drohnen ein brauchbares Ergebnis. Bei der „Diagonalmethode“ werden einfach die Diagonalen der Motoren mit z.B. einer Schnur (blau im Bild) dargestellt. Der Schnittpunkt soll dann der Drohnenschwerpunkt sein. Dies stimmt leider nicht immer, wie im Bild zu sehen. Das schwarze Kreuz befindet sich genau mittig zwischen den Motoren und ist somit der Soll-Schwerpunkt.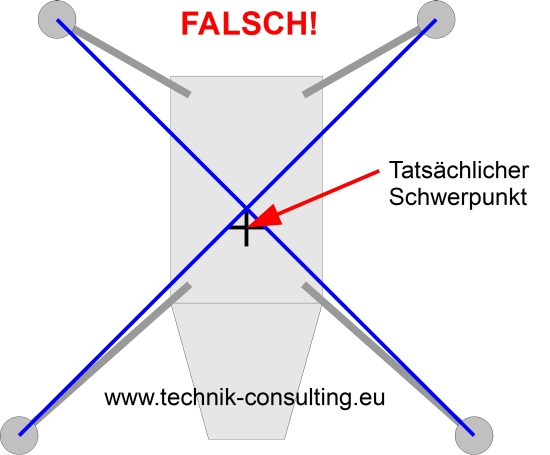
Besser ist es eine Schnur außen (grün im Bild) um die Motorachsen zu spannen. Dann mit einem Meterstab die Länge jeder Außenseite ausmessen, halbieren und eine Markierung an der Schnur anbringen. Werden diese Markierungen zu einem Kreuz verbunden (blau im Bild), ist der Schnittpunkt der tatsächliche Schwerpunkt, den die Drohne haben sollte.
Überprüfen Sie den Schwerpunkt in einer Achse, indem Sie die flugfertige Drohne auf zwei Fingern ausbalancieren. Danach prüfen Sie die andere Achse. Verschieben Sie notfalls Komponenten in der Drohne wie beispielsweise den Akku, um den Schwerpunkt optimal einzustellen
Bei weiteren Fragen, sprechen Sie mit uns.